Sparse Table
简介¶
ST 表是用于解决 可重复贡献问题 的数据结构。
什么是可重复贡献问题?
可重复贡献问题 是指对于运算 ,满足 ,则对应的区间询问就是一个可重复贡献问题。例如,最大值有 ,gcd 有 ,所以 RMQ 和区间 GCD 就是一个可重复贡献问题。像区间和就不具有这个性质,如果求区间和的时候采用的预处理区间重叠了,则会导致重叠部分被计算两次,这是我们所不愿意看到的。另外, 还必须满足结合律才能使用 ST 表求解。
什么是RMQ?
RMQ 是英文 Range Maximum/Minimum Query 的缩写,表示区间最大(最小)值。解决 RMQ 问题有很多种方法,可以参考 RMQ 专题。
引入¶
题目大意:给定 个数,有 个询问,对于每个询问,你需要回答区间 中的最大值。
考虑暴力做法。每次都对区间 扫描一遍,求出最大值。
显然,这个算法会超时。
ST 表¶
ST 表基于 倍增 思想,可以做到 预处理, 回答每个询问。但是不支持修改操作。
基于倍增思想,我们考虑如何求出区间最大值。可以发现,如果按照一般的倍增流程,每次跳 步的话,询问时的复杂度仍旧是 ,并没有比线段树更优,反而预处理一步还比线段树慢。
我们发现 ,也就是说,区间最大值是一个具有“可重复贡献”性质的问题。即使用来求解的预处理区间有重叠部分,只要这些区间的并是所求的区间,最终计算出的答案就是正确的。
如果手动模拟一下,可以发现我们能使用至多两个预处理过的区间来覆盖询问区间,也就是说询问时的时间复杂度可以被降至 ,在处理有大量询问的题目时十分有效。
具体实现如下:
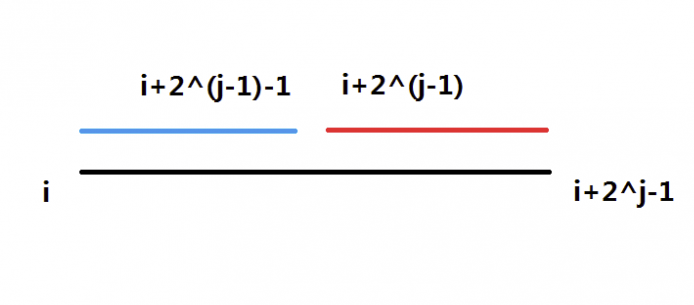
令 表示区间 的最大值。
显然 。
根据定义式,第二维就相当于倍增的时候“跳了 步”,依据倍增的思路,写出状态转移方程:。
以上就是预处理部分。而对于查询,可以简单实现如下:
对于每个询问 ,我们把它分成两部分: 与 。
其中 。
根据上面对于“可重复贡献问题”的论证,由于最大值是“可重复贡献问题”,重叠并不会对区间最大值产生影响。又因为这两个区间完全覆盖了 ,可以保证答案的正确性。
模板代码¶
#include <bits/stdc++.h>
using namespace std;
const int logn = 21;
const int maxn = 2000001;
int f[maxn][logn + 1], Logn[maxn + 1];
inline int read() {
char c = getchar();
int x = 0, f = 1;
while (c < '0' || c > '9') {
if (c == '-') f = -1;
c = getchar();
}
while (c >= '0' && c <= '9') {
x = x * 10 + c - '0';
c = getchar();
}
return x * f;
}
void pre() {
Logn[1] = 0;
Logn[2] = 1;
for (int i = 3; i < maxn; i++) {
Logn[i] = Logn[i / 2] + 1;
}
}
int main() {
int n = read(), m = read();
for (int i = 1; i <= n; i++) f[i][0] = read();
pre();
for (int j = 1; j <= logn; j++)
for (int i = 1; i + (1 << j) - 1 <= n; i++)
f[i][j] = max(f[i][j - 1], f[i + (1 << (j - 1))][j - 1]);
for (int i = 1; i <= m; i++) {
int x = read(), y = read();
int s = Logn[y - x + 1];
printf("%d\n", max(f[x][s], f[y - (1 << s) + 1][s]));
}
return 0;
}注意点¶
-
输入输出数据一般很多,建议开启输入输出优化。
-
每次用 std::log 重新计算 log 函数值并不值得,建议进行如下的预处理:
ST 表维护其他信息¶
除 RMQ 以外,还有其它的“可重复贡献问题”。例如“区间按位和”、“区间按位或”、“区间 GCD”,ST 表都能高效地解决。
需要注意的是,对于“区间 GCD”,ST 表的查询复杂度并没有比线段树更优(令值域为 ,ST 表的查询复杂度为 ,而线段树为 ,且值域一般是大于 的),但是 ST 表的预处理复杂度也没有比线段树更劣,而编程复杂度方面 ST 表比线段树简单很多。
如果分析一下,“可重复贡献问题”一般都带有某种类似 RMQ 的成分。例如“区间按位与”就是每一位取最小值,而“区间 GCD”则是每一个质因数的指数取最小值。
总结¶
ST 表能较好的维护“可重复贡献”的区间信息(同时也应满足结合律),时间复杂度较低,代码量相对其他算法很小。但是,ST 表能维护的信息非常有限,不能较好地扩展,并且不支持修改操作。
练习¶
[USACO07JAN]平衡的阵容 Balanced Lineup
附录:ST 表求区间 GCD 的时间复杂度分析¶
在算法运行的时候,可能要经过 次迭代。每一次迭代都可能会使用 GCD 函数进行递归,令值域为 ,GCD 函数的时间复杂度最高是 的,所以总时间复杂度看似有 。
但是,在 GCD 的过程中,每一次递归(除最后一次递归之外)都会使数列中的某个数至少减半,而数列中的数最多减半的次数为 ,所以,GCD 的递归部分最多只会运行 次。再加上循环部分(以及最后一层递归)的 ,最终时间复杂度则是 ,由于可以构造数据使得时间复杂度为 ,所以最终的时间复杂度即为 。
而查询部分的时间复杂度很好分析,考虑最劣情况,即每次询问都询问最劣的一对数,时间复杂度为 。因此,ST 表维护“区间 GCD”的时间复杂度为预处理 ,单次查询 。
线段树的相应操作是预处理 ,查询 。
这并不是一个严谨的数学论证,更为严谨的附在下方:
更严谨的证明
理解本段,可能需要具备 时间复杂度 的关于“势能分析法”的知识。
先分析预处理部分的时间复杂度:
设“待考虑数列”为在预处理 ST 表的时候当前层循环的数列。例如,第零层的数列就是原数列,第一层的数列就是第零层的数列经过一次迭代之后的数列,即 st[1..n][1],我们将其记为 。
而势能函数就定义为“待考虑数列”中所有数的累乘的以二为底的对数。即:。
在一次迭代中,所花费的时间相当于迭代循环所花费的时间与 GCD 所花费的时间之和。其中,GCD 花费的时间有长有短。最短可能只有两次甚至一次递归,而最长可能有 次递归。但是,GCD 过程中,除最开头一层与最末一层以外,每次递归都会使“待考虑数列”中的某个结果至少减半。即, 会减少至少 ,该层递归所用的时间可以被势能函数均摊。
同时,我们可以看到, 的初值最大为 ,而 不增。所以,ST 表预处理部分的时间复杂度为 。
buildLast update and/or translate time of this article,Check the history
editFound smelly bugs? Translation outdated? Wanna contribute with us? Edit this Page on Github
peopleContributor of this article OI-wiki
translateTranslator of this article Visit the original article!
copyrightThe article is available under CC BY-SA 4.0 & SATA ; additional terms may apply.